ATtiny2313からTC1602E-13Aを使ってみます。

(TC1602E-13A)
まずは下準備。 コネクタを付けないと使えないです。
 (表) |  (裏) |
下のようにピンヘッダーを付けました。
次はバックライトをロジック電源と同一にしたいので、以下のJ2とJ3をハンダ付けして短絡します。
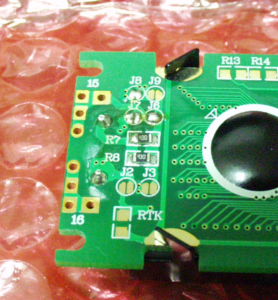 (短絡前) | 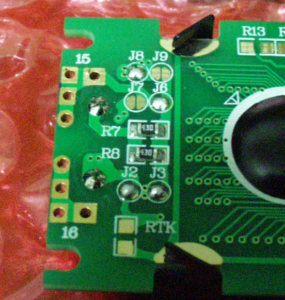 (短絡後) |
ハンダ付けは慣れていないので、上手いとか下手とか分かりませんが、きっと下手だと思います。
下準備ができたら、ブレッドボードを使って、ATtiny2313とTC1602E-13Aを接続します。
接続図は、bread.shが使えそうでしたので、試みましたが、こんなひどい図になってしまいました。やはり斜めのワイヤーを直線で引くと見難いですね。そのうち直します。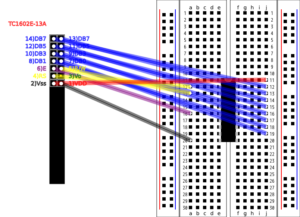
仕方なくlibreOfficeで書いた接続図です。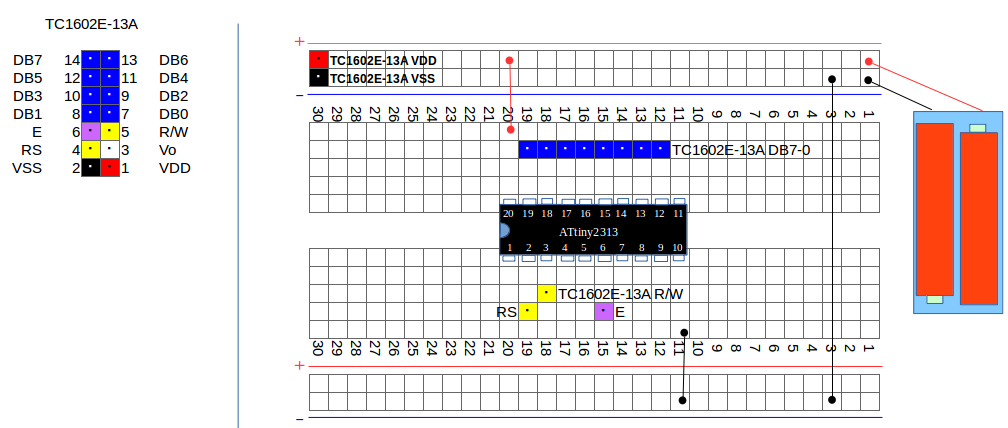
LCDへコマンドを送るのは、EをHにしてLにすれば良いです。つまり、Eは、PORTDの2に割り当ててあるので、コマンドを送信するには、
PORTD |= 0b00000100;
で、PD2をHにして、
PORTD &= ~0b00000100;
で、PD2をLにすれば良いことになります。
TC1602Eのマニュアルによると、EのHしてLにする時間は、最低でも450ナノ秒必要ですので、ざっくり1マイクロ秒をウェイト(_delay_us(1))で入れています。ただし、CPUクロックは1MHzで動作していますので、1命令実行すれば1usぐらいは経過します。他MPUで動かす場合の保険として入れておきます。
プログラムはこんな風になりました。学習のためのプログラムなので、あえて関数化やマクロ化はしてません。
~$ cat -n test.c
1 #include <avr/io.h>
2 #include <util/delay.h>
3
4 int main(void)
5 {
6 DDRB = 0b11111111; //ATtiny2313 pin.12-19 PB0-7 OUT
7 DDRD = 0b00000111; //ATtiny2313 pin.2,3,6 PD0-2 OUT
8
9 PORTD = 0b00000000; //RS(PD0)=L,R/W(PD1)=L,E(PD2)=L
10
11 // After power on
12 _delay_ms(41);
13
14 // Function Set(8bit mode) 1st
15 PORTB = 0b00111000;
16 PORTD = 0b00000000; //RS(PD0)=L R/W(PD1)=L
17 _delay_us(1);
18 PORTD = 0b00000100; //E(PD2)=H
19 _delay_us(1);
20 PORTD = 0b00000000; //E(PD2)=L
21 _delay_ms(5); //more than 4.1ms
22
23 // Function Set(8bit mode) 2nd
24 PORTD = 0b00000100; //E(PD2)=H
25 _delay_us(1);
26 PORTD = 0b00000000; //E(PD2)=L
27 _delay_us(100); //more than 100us
28
29 // Function Set(8bit mode) 3rd
30 PORTD = 0b00000100; //E(PD2)=H
31 _delay_us(1);
32 PORTD = 0b00000000; //E(PD2)=L
33 _delay_us(40); //more than 38us
34
35 // Function Set(Rows and Fonts)
36 PORTB = 0b00110100;
37 _delay_us(1);
38 PORTD = 0b00000100; //E(PD2)=H
39 _delay_us(1);
40 PORTD = 0b00000000; //E(PD2)=L
41 _delay_us(40); //more than 38us
42
43 // Display OFF
44 PORTB = 0b00001000;
45 _delay_us(1);
46 PORTD = 0b00000100; //E=1(PD2)=H
47 _delay_us(1);
48 PORTD = 0b00000000; //E=0(PD2)=L
49 _delay_us(40); //more than 38us
50
51 // Clear Display
52 PORTB = 0b00000001;
53 _delay_us(1);
54 PORTD = 0b00000100; //E=1(PD2)=H
55 _delay_us(1);
56 PORTD = 0b00000000; //E=0(PD2)=L
57 _delay_ms(2); //more than 1.52ms
58
59 // Entry Mode Set(Cursor and Shift)
60 PORTB = 0b00000110;
61 _delay_us(1);
62 PORTD = 0b00000100; //E=1(PD2)=H
63 _delay_us(1);
64 PORTD = 0b00000000; //E=0(PD2)=L
65 _delay_us(40); //more than 38us
66
67 // Display ON
68 PORTB = 0b00001111;
69 _delay_us(1);
70 PORTD = 0b00000100; //E=1(PD2)=H
71 _delay_us(1);
72 PORTD = 0b00000000; //E=0(PD2)=L
73 _delay_us(40); //more than 38us
74
75 // Write Data
76 PORTB = 'H';
77 PORTD = 0b00000001; //RS(PD0)=H
78 _delay_us(1);
79 PORTD = 0b00000101; //RS(PD0)=H,E(PD2)=H
80 _delay_us(1);
81 PORTD = 0b00000001; //RS(PD0)=H,E(PD2)=L
82 _delay_us(40); //more than 38us
83
84 // Write Data
85 PORTB = 'E';
86 PORTD = 0b00000001; //RS(PD0)=H
87 _delay_us(1);
88 PORTD = 0b00000101; //RS(PD0)=H,E(PD2)=H
89 _delay_us(1);
90 PORTD = 0b00000001; //RS(PD0)=H,E(PD2)=L
91 _delay_us(40); //more than 38us
92
93 // Write Data
94 PORTB = 'L';
95 PORTD = 0b00000001; //RS(PD0)=H
96 PORTD = 0b00000101; //RS(PD0)=H,E(PD2)=H
97 _delay_us(1);
98 PORTD = 0b00000001; //RS(PD0)=H,E(PD2)=L
99 _delay_us(40); //more than 38us
100
101 // Write Data
102 PORTB = 'L';
103 PORTD = 0b00000001; //RS(PD0)=H
104 PORTD = 0b00000101; //RS(PD0)=H,E(PD2)=H
105 _delay_us(1);
106 PORTD = 0b00000001; //RS(PD0)=H,E(PD2)=L
107 _delay_us(40); //more than 38us
108
109 // Write Data
110 PORTB = 'O';
111 PORTD = 0b00000001; //RS(PD0)=H
112 PORTD = 0b00000101; //RS(PD0)=H,E(PD2)=H
113 _delay_us(1);
114 PORTD = 0b00000001; //RS(PD0)=H,E(PD2)=L
115 _delay_us(40); //more than 38us
116
117 while(1)
118 ;
119
120 return 0;
121 }
写りが悪いですが、このように表示されます。
※ソースはgithubに登録してます。
takk@deb83:~$ git clone https://github.com/takkete/bread.git Cloning into 'bread'... remote: Counting objects: 52, done. remote: Compressing objects: 100% (29/29), done. remote: Total 52 (delta 7), reused 0 (delta 0), pack-reused 17 Unpacking objects: 100% (52/52), done. Checking connectivity... done. takk@deb83:~$ cd bread/mcu/avr/attiny2313/device/tc1602e-13a/ takk@deb83:~/bread/mcu/avr/attiny2313/device/tc1602e-13a$ make

コメント
[…] 前回「AVRからPORT制御のLCDを使う(ATtiny2313,TC1602E-13A)」で、8BITモードで使用したキャラクタLCDですが、今回は4BITモードで使います。 […]